

Physikalische Grundlagen von Radaranlagen zur Flugüberwachung
Erstellt am: 04.03.2013 | Stand des Wissens: 30.06.2023
Synthesebericht gehört zu:

Radaranlagen dienen im Flugbetrieb der Detektion von Luftfahrzeugen. Die Radaranlage sendet hochfrequente elektromagnetische Wellen aus, welche auf Grund ihrer quasioptischen Eigenschaften am Luftfahrzeug reflektiert und mittels eines Empfängers an der Radaranlage als Echo wieder empfangen werden. Über die Laufzeitmessung zwischen dem Sendesignal und dem Empfangssignal kann die Schrägentfernung zwischen Luftfahrzeug und Radaranlage bestimmt werden. Zur Erfassung eines möglichst großen Bereichs des Luftraums befinden sich die Radaranlagen in einer permanenten Rotation. Die Umlaufzeit ist dabei anlagenabhängig, beträgt jedoch etwa 4 Sekunden. Während eines Umlaufs detektiert die Radaranlage alle Hindernisse, an welchen die elektromagnetischen Wellen reflektiert werden. Damit werden neben den gewünschten Luftfahrzeugen mitunter auch größere Vogelschwärme oder auch feststehende Hindernisse erfasst.
Die Detektionsergebnisse einer Radaranlage werden in einem Rechenzentrum mit sich überlappenden Detektionsgebieten weiterer Radaranlagen kombiniert, gefiltert und anschließend der Flugsicherung über Displays zur Anzeige gebracht. Das Filtern der Signale ermöglicht dabei eine Festzielunterdrückung, beispielsweise von Gebäuden. Für Radaranlagen ist dies bedingt durch den permanenten Umlauf der Rotoren beziehungsweise die windbedingte Variation der Rotorenausrichtung nicht in jedem Fall möglich.
Die Detektionsergebnisse einer Radaranlage werden in einem Rechenzentrum mit sich überlappenden Detektionsgebieten weiterer Radaranlagen kombiniert, gefiltert und anschließend der Flugsicherung über Displays zur Anzeige gebracht. Das Filtern der Signale ermöglicht dabei eine Festzielunterdrückung, beispielsweise von Gebäuden. Für Radaranlagen ist dies bedingt durch den permanenten Umlauf der Rotoren beziehungsweise die windbedingte Variation der Rotorenausrichtung nicht in jedem Fall möglich.
Grundsätzlich werden Radaranlagen in Primär- und Sekundär-Radaranlagen unterschieden. Das Primärradar arbeitet mit dem passiven Echo der Luftfahrzeuge, das heißt, das vom Radar gesendete Signal wird am Luftfahrzeug reflektiert und durch die Radaranlage wieder empfangen. Im Gegensatz dazu arbeitet das Sekundärradar mit aktiven Antwortsignalen der Luftfahrtzeuge. Es werden, wie auch beim Primärradar, hochfrequente Signale gesendet. Diese stellen eine Abfrage dar, welche am Luftfahrzeug mit Hilfe eines Transponders empfangen, verarbeitet und als direktes Antworttelegramm an das Radar zurückgesendet werden. Die Funktionsweise eines Radargerätes basiert auf folgenden drei grundlegenden physikalischen Eigenschaften [Wolff12]:
- Konstante Ausbreitungsgeschwindigkeit der elektromagnetischen Wellen: Elektromagnetische Wellen breiten sich annähernd mit Lichtgeschwindigkeit aus.
- Geradlinige Ausbreitung der elektromagnetischen Wellen: Im Frequenzbereich der Radargeräte ist von einer geradlinigen Ausbreitung der elektromagnetischen Wellen auszugehen.
- Reflexion elektromagnetischer Wellen: Elektromagnetische Wellen treffen auf einen elektrisch leitenden Körper und werden an diesem reflektiert, mit der Eigenschaft Einfallswinkel gleich Ausfallswinkel [Wolff12].
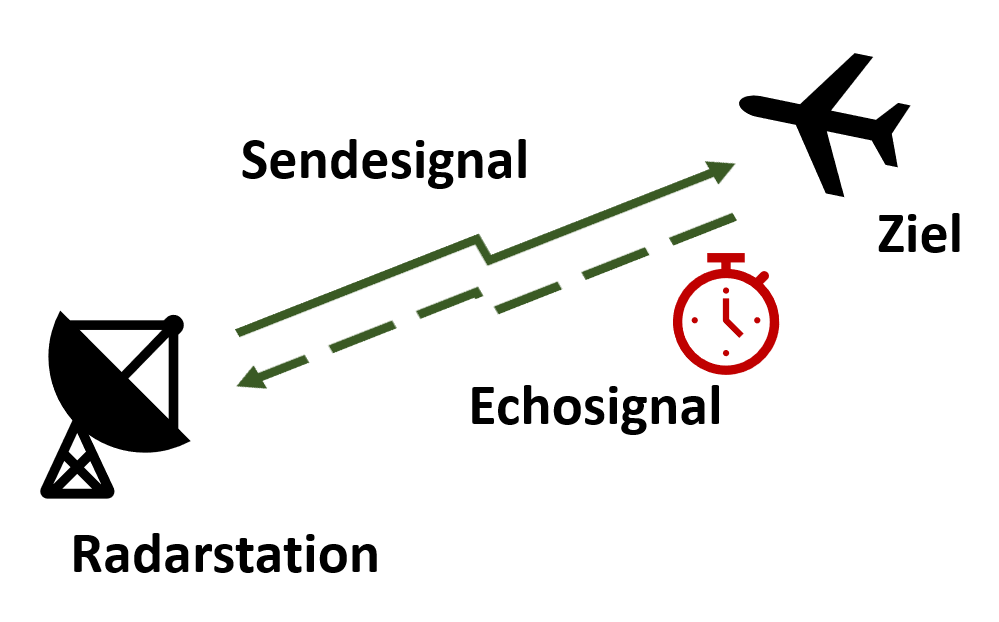 Abbildung 1: Seitenwinkelbestimmung (Azimut) (Eigene Darstellung nach [Wolff12])
Abbildung 1: Seitenwinkelbestimmung (Azimut) (Eigene Darstellung nach [Wolff12])Im Folgenden wird das grundlegende Ortungsprinzip der Radaranlagen durch die Richtungsermittlung eines Ziels und die Berechnung der Zielhöhe erläutert.
1. Richtungsermittlung eines Ziels: Durch die sich horizontal drehenden Radarantennen wird die zu erfassende Fläche maximal ausgedehnt. Jeder Drehbewegung werden Winkelwerte von 0° bis 360° zugeordnet, dabei ist Norden (0°) die Bezugsrichtung. Die Erhöhung des sogenannten Seitenwinkels erfolgt im Uhrzeigersinn und kann gegebenenfalls auch relativ zum eigenen Kurs angegeben werden. Der Seitenwinkel wird auch Azimut genannt (siehe Abbildung 2) [Wolff12].
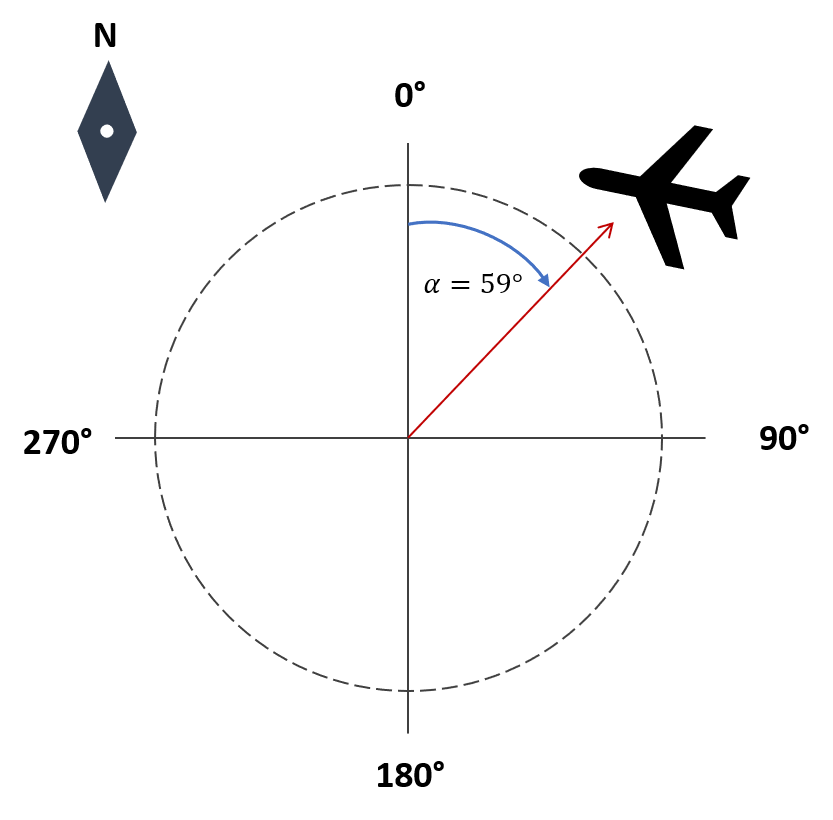 Abbildung 2: Seitenwinkelbestimmung (Azimut) (Eigene Darstellung nach[Wolff12]
Abbildung 2: Seitenwinkelbestimmung (Azimut) (Eigene Darstellung nach[Wolff12]2. Berechnung der Zielhöhe: Die Zielhöhe definiert den Abstand des Ziels (Luftfahrzeug) über der Erdoberfläche, der Höhe über Grund. Diese Höhe kann annähernd mit Hilfe des Satz des Pythagoras durch die Zielentfernung (R) und den Höhenwinkel (Elevation) bestimmt werden (siehe Abbildung 3). Bezogen auf ein reales Luftfahrtzeug, wird die Flughöhenbestimmung durch die verschiedenen Luftschichtenübergänge der Atmosphäre und dem damit einhergehenden unterschiedlichen Brechungseigenschaften der elektromagnetischen Wellen des Radars erschwert. Zudem ist die die Krümmung der Erdoberfläche zu beachten [Wolff12].
